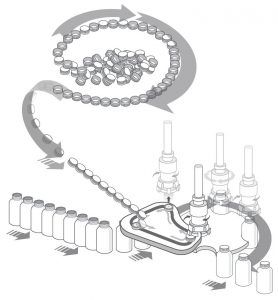
Bottles are transferred from the conveyor to the rotary turret assembly by star wheel.
Bulk cap feed with on demand controls.
Caps are sorted and fed by vibratory feeder.
Cap release by bottle sensor.
Cap pick-up by oscillating disc and transferred to capping head.
The servo controlled rotary capping station has 4 capping heads.
Capping head descends and rotates to close the cap to a preset amount of torque.
Applicable for screw, ROPP (roll on pilfer proof) and press-on caps (NOTE: May require optional parts).
Cap gripper mechanism allows it to work with various safety caps and special shaped caps including CRC.
Capping heads are torque controlled using servo with electronic torque adjustment and torque monitoring on the screen.
Powered height adjustment for capping head and cap feeder
Star-wheel overload detection with automatic stop
Container rejection for missing, misaligned and skewed caps.